BUAA_CO_P5和P6CPU设计文稿
P5——CPU设计文稿
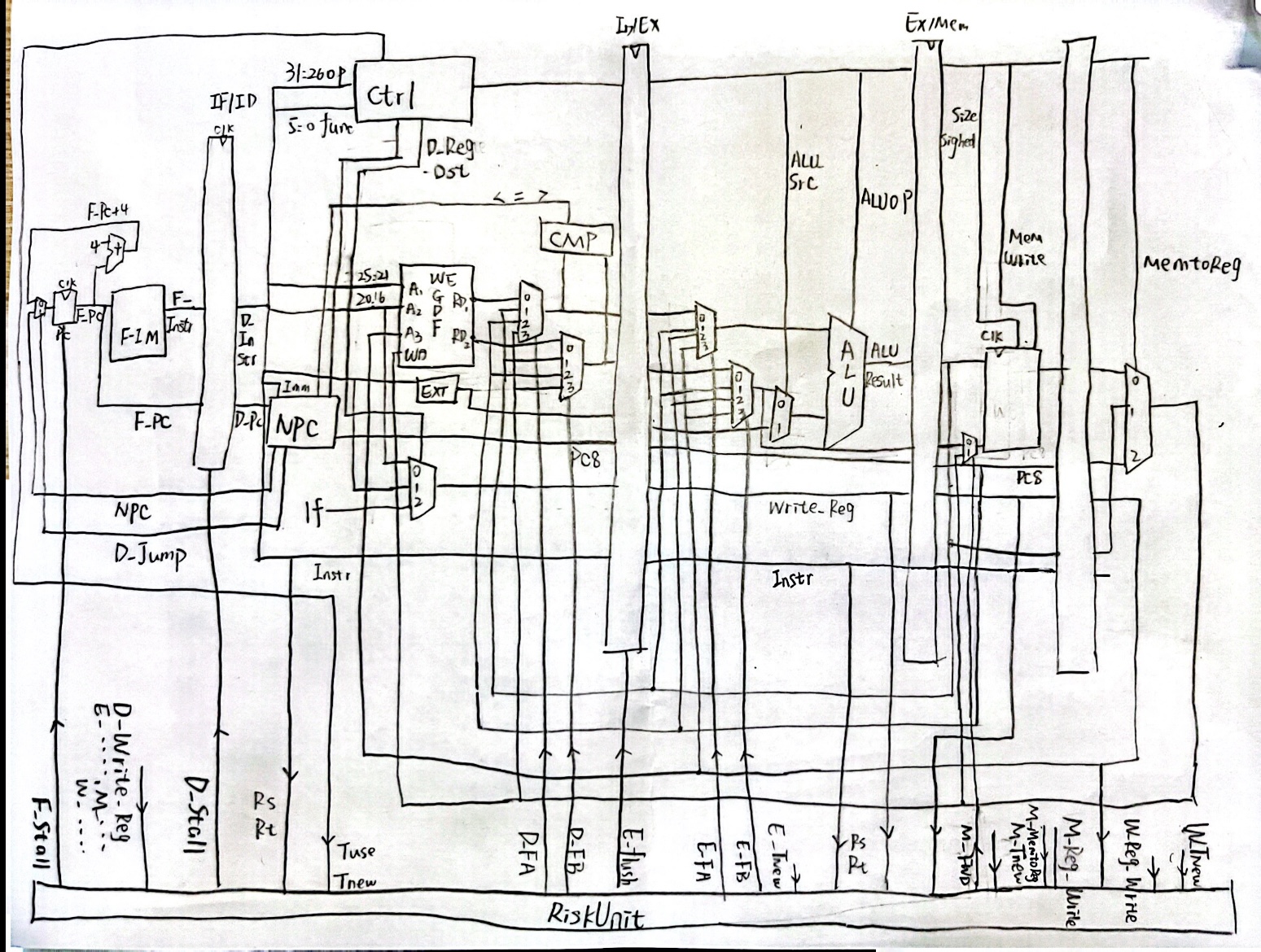
1.总示意图
2.命名规范
1.模块以及接口加上各级前缀
2.属于某模块在级后面在加模块名
3.模块定义
1)Datapath
1、E_ALU模块
同指导书,改为case来操作
| 信号名 | 方向 | 描述 | |
|---|---|---|---|
| E_ALU_A [31 : 0] | I | 32位输入信号 | |
| E_ALU_B [31 : 0] | I | 32位输入信号 | |
| E_ALU_Shamt [4 : 0] | I | 五位输入信号 | |
| E_ALUop [2 : 0] | I | 操作选择控制 E_ALUop == 3’b000 A +B; E_ALUop == 3’b001 A - B; E_ALUop == 3’b010 A \ |
B; E_ALUop == 3’b011 A & B; E_ALUop == 3’b100 B左移Shamt位 E_ALUop == 3’b101 B加载到高位 |
| E_ALU_Result [31 : 0] | O | 32位输出信号 |
2、D_CMP模块
从原来的ALU模块分离出来到译码阶段
| 信号名 | 方向 | 描述 |
|---|---|---|
| D_CMP_A [31: 0] | I | 32位输入 |
| D_CMP_B [31: 0] | I | 32位输入 |
| D_CMP_Equal | O | 相等 ? 1 :0 |
| D_CMP_Less | O | 小于 ? 1 :0 |
| D_CMP_Greater | O | 大于 ? 1 : 0 |
3、E_EXT模块
| 信号名 | 方向 | 描述 |
|---|---|---|
| D_EXT_Imm [15: 0 ] | I | 16位待扩展立即数 |
| D_EXTop [1:0] | I | 扩展选择 D_EXTop == 2’b00 符号扩展 D_EXTop == 2’b01 无符号扩展 |
| D_EXT_Result [31:0] | O | 扩展结果 |
4、F_PC模块
| 信号名 | 方向 | 描述 |
|---|---|---|
| F_PC_clk | I | 时钟信号 |
| F_PC_reset | I | 复位信号 |
| F_PC_en | I | 使能信号 |
| F_PC_ NPC [31:0] | I | 32位输入信号 |
| F_PC_PC [31:0] | O | 输出信号 |
5、F_IM模块
| 信号名 | 方向 | 描述 |
|---|---|---|
| F_IM_PC [31:0] | I | 32位取址信号 |
| F_IM_Instr [31 :0] | O | 32位结果 |
6、D_NPC模块
| 信号名 | 方向 | 描述 |
|---|---|---|
| D_NPC_PC[31:0] | I | 32位PC信号 |
| D_NPC_Imm[26:0] | I | 26位立即数地址 |
| D_NPC_RA[31:0] | I | $RA |
| D_NPC_Branch[2 :0] | I | 对应不同Branch 3’b000表示不是Branch 若为3’b001对应beq |
| D_NPC_J | I | 对应J跳转指令 |
| D_NPC_JR | I | 对应Jr跳转指令 |
| D_NPC_Equal | I | 比较结果 |
| D_NPC_Great | I | 比较结果 |
| D_NPC_Less | I | 比较结果 |
| D_NPC_NPC[31:0] | O | |
| D_Jump | O | 判断地址是否跳转 |
7、D_GRF模块
| 信号名 | 方向 | 描述 |
|---|---|---|
| D_GRF_A1 [4:0] | I | 5位地址输入信号,输入rs指定的寄存器并将其结果读出到RD1 |
| D_GRF_A2 [4:0] | I | 5位地址输入信号,输入rt指定的寄存器并将其结果读出到RD2 |
| D_GRF_A3 [4:0] | I | 5位地址输入信号,输入rd指定的寄存器并将WD写入 |
| D_GRF_WD [31:0] | I | 32位输入信号 |
| D_GRF_clk | I | 时钟信号 |
| D_GRF_reset | I | 异步复位信号 |
| D_GRF_WE | I | 使能信号 |
| D_GRF_RD1 [31:0] | O | 输出A1指定寄存器的32位数据 |
| D_GRF_RD2 [31:0] | O | 输出A2指定寄存器的32位数据 |
8、M_DM模块
| 信号名 | 方向 | 描述 |
|---|---|---|
| M_DM_clk | I | 时钟信号 |
| M_DM_reset | I | 复位信号 |
| M_Mem_Write | I | 写信号 |
| M_signed | I | 输出是否符号位扩展信号 |
| Size | I | 决定是字、半字、字节 |
| M_ALU_Result[31:0] | I | 储存地址 |
| M_WriteData[31:0] | I | 储存数据 |
| M_PC[31:0]] | I | PC |
| M_Read_Data | O | load结果 |
9、Controller
根据名称要求更改,采取重构
| 信号名 | 方向 |
|---|---|
| opcode[5:0] | I |
| funct[5:0] | I |
| D_EXTop [1:0] | O |
| D_NPC_Branch [2:0] | O |
| D_NPC_J | O |
| D_NPC_JR | O |
| E_Reg_Dst [1:0] | O |
| E_ALU_Src [1:0] | O |
| E_ALUop [2:0] | O |
| M_Mem_Write | O |
| M_DM_Size[1:0] | O |
| M_Signed | O |
| W_MemtoReg [1:0] | O |
| W_RegWrite | O |
| D_Rs_Tuse | O |
| D_Rt_Tuse | O |
| D_Tnew | O |
其真值表对应如下,同时改为case结构,代码长度显著增加,但便于debug
| 指令 | D_EXTop[1:0] | D_NPC_Branch[2:0] | D_NPC_J | D_NPC_JR | D_Reg_Dst[1:0] | E_ALU_Src[1:0] | E_ALUop[2:0] | M_Mem_Write | M_DM_Size[1:0] | M_signed | W_MemtoReg[1:0] | W_RegWrite |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Add | 00 | 000 | 0 | 0 | 01 | 00 | 000 | 0 | 00 | 0 | 01 | 1 |
| Sub | 00 | 000 | 0 | 0 | 01 | 00 | 001 | 0 | 00 | 0 | 01 | 1 |
| Jr | 00 | 000 | 0 | 1 | 00 | 00 | 000 | 0 | 00 | 0 | 00 | 0 |
| Ori | 01 | 000 | 0 | 0 | 00 | 01 | 010 | 0 | 00 | 0 | 01 | 1 |
| Lw | 00 | 000 | 0 | 0 | 00 | 01 | 000 | 0 | 00 | 0 | 00 | 1 |
| Sw | 00 | 000 | 0 | 0 | 00 | 01 | 000 | 1 | 00 | 0 | 00 | 0 |
| Beq | 00 | 001 | 0 | 0 | 00 | 00 | 000 | 0 | 00 | 0 | 00 | 0 |
| Lui | 00 | 000 | 0 | 0 | 00 | 01 | 101 | 0 | 00 | 0 | 01 | 1 |
| J | 00 | 000 | 1 | 0 | 00 | 00 | 00 | 0 | 00 | 0 | 00 | 0 |
| Jal | 00 | 000 | 1 | 0 | 10 | 01 | 000 | 0 | 00 | 0 | 10 | 1 |
2)RiskUnit 冒险处理
D_Tuse与D_Tnew表格,每次走过一个寄存器,T_new都会减一
Tuse<Tnew 暂停
对不需要使用寄存器的Tuse置最大值。
注意:不转发0
| 指令 | D_Rs_Tuse | D_Rt_Tuse | D_Tnew |
|---|---|---|---|
| Add | 1 | 1 | 2 |
| Sub | 1 | 1 | 2 |
| Jr | 0 | M | 0 |
| Ori | 1 | M | 2 |
| Lw | 1 | M | 3 |
| Sw | 1 | 2 | 0 |
| Beq | 0 | 0 | 0 |
| Lui | M | M | 2 |
| J | M | M | 0 |
| Jal | M | M | 2 |
4.测试数据
1 | |
5.思考题
1.在D级就直接就直接计算出是否需要跳转,若需要发生跳转,由于NPC是组合逻辑,下一条指令的地址直接传出到PC模块,这样只会多读跳转指令下一条的指令,即使将分支判断提到 D 级,发生跳转的时候,F 级指令依然是需要作废的。但是我们如果约定 F 级指令不作废呢?也就是说,不论判断结果如何,我们都将执行分支或跳转指令的下一条指令。这也就是所谓的“延迟槽”。那么指令执行的效率就提高了。
2.Jal需要将jal下一条指令的位置写入$ra寄存器,由于延迟槽的地址是PC+4,所以实际应该写回PC +8了。
3.流水线中的各个阶段需要在特定的时钟周期内完成其任务。如果数据来自功能部件,可能会增加流水线的复杂性,导致更难以保持稳定的时序。通过限制数据转发只能来自寄存器,可以简化流水线的设计,提高稳定性。
4.当前 GPR 被写入的值会即时反馈到读取端上。具体的说,当读寄存器时的地址与同周期写寄存器的地址相同时,我们将读取的内容改为写寄存器的内容,而不是该地址可以索引到的寄存器文件中的值。这也就对应着图中的两个四选一多路选择器。利用冲突单元生成选择信号即可
1 | |
5.需求者:D级:CMP,E级:ALU
提供者:M级:ALU_Result,PC8
W级:因为已经被选择过,过Writeback_Data就已经可以满足需求
6.大致可将指令分为三类
1)计算指令,主要对ALU模块进行增加操作,如Add指令
2)跳转指令,可能需要调整ALU模块或者NPC,由于这里是流水线,ALU模块的输出不能直接和单周期一样课上直接连在NPC模块,可能需要考虑在增加D级就增加符合跳转的运算
3)访存指令,DM中已经支持字、半字、字节的存取,根据题意做ALU,NPC等对应的增添即可
7.采取分散式译码
译码结果较易观察,且不容易产生bug,不同指令之间完全分离,缺点就是代码冗长。
选做2,采取交叉式出现
P6——CPU
支持指令:add, sub, and, or, slt, sltu, lui addi, andi, ori lb, lh, lw, sb, sh, sw mult, multu, div, divu, mfhi, mflo, mthi, mtlo beq, bne, jal, jr
1.模块定义
增加E_MUDI乘除模块与M_DE模块,删除看F_IM与M_DM模块
1、M_BE
| 信号名 | 方向 | 描述 |
|---|---|---|
| M_BE_A[1:0] | I | 最低两位的地址 |
| M_BE_Din[31:0] | I | 输入的 32 位数据 |
| M_BE_Op[2:0] | I | 数据扩展控制码 000: 无扩展 001:无符号字节数据扩展 010:符号字节数据扩展 011:无符号半字数据扩展 100:符号半字数据扩展 |
| M_BE_Dout[31:0] | O | 扩展后的 32 位数据 |
2、E_MUDI
| 信号名 | 方向 | 描述 |
|---|---|---|
| E_MUDI_clk | I | 时钟信号 |
| E_MUDI_reset | I | 复位信号 |
| E_MUDI_A [31:0] | I | 运算数据A |
| E_MUDI_B [31:0] | I | 运算数据B |
| E_MUDI_Start | I | 开始计算信号 |
| E_MUDI_op [2:0] | I | 运算选择信号 |
| E_HI_Write | I | 高位写信号 |
| E_LO_Write | I | 地位写信号 |
| E_HI [31:0] | O | 高位寄存器输出结果 |
| E_LO[31:0] | O | 低位寄存器输出结果 |
| E_MUDI_Busy | O | 计算中信号 |
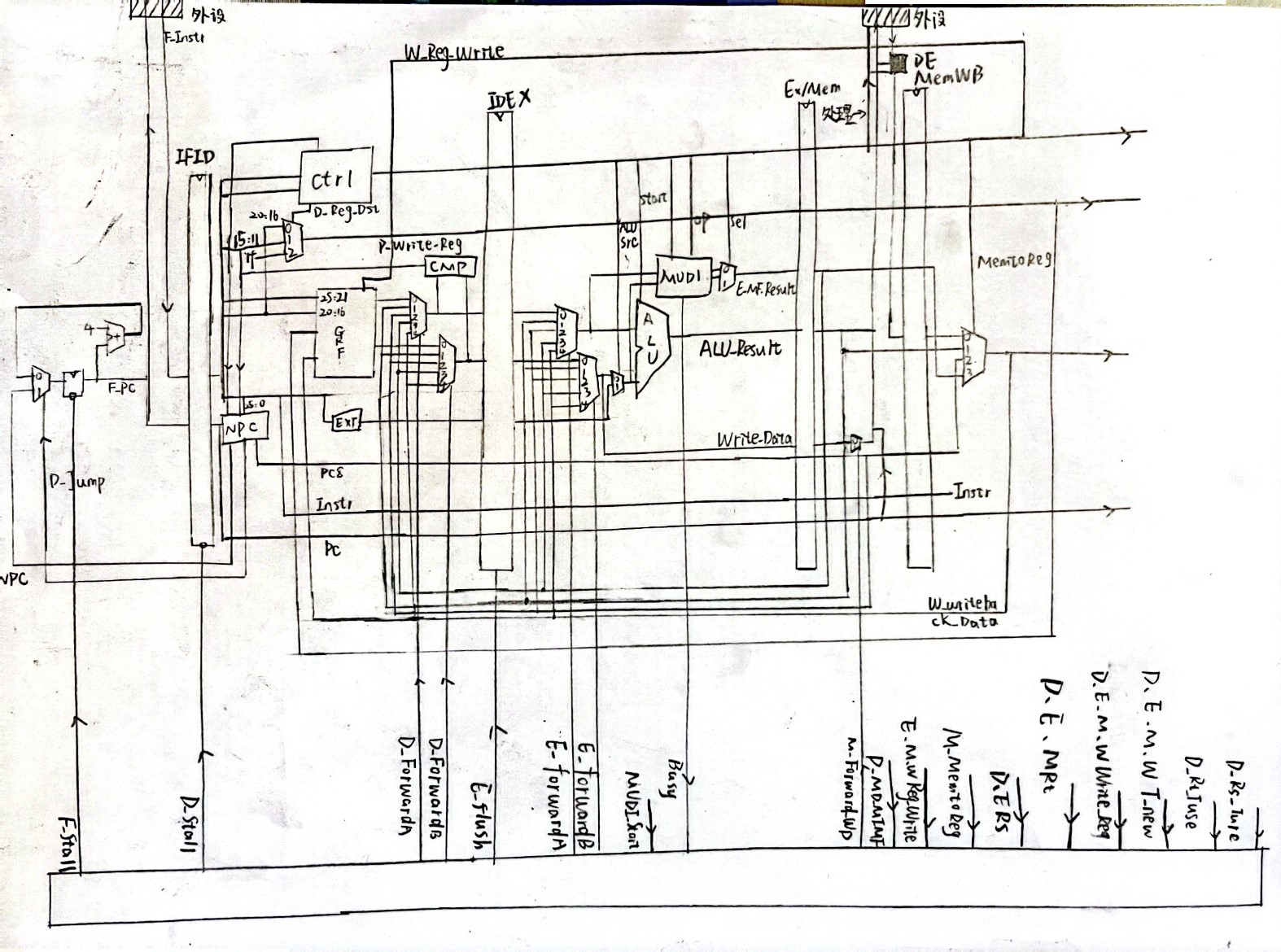
2.总示意图
3.思考题
1.乘除法运算效率远低于ALU内的各个计算,需要耗费大量时间,放在一起会大大拖慢效率,独立的HI、LO也是为了高效率,因为只有乘除法会用到高位寄存器,低位寄存器,与其他不一致,分开便于控制。
2.真实的流水线 CPU 使用乘法和除法指令来实现乘除法运算。在执行乘法和除法指令时,CPU会将操作数加载到寄存器中,然后通过一系列的算术逻辑单元(ALU)来进行乘法或除法计算。这些计算通常会在多个时钟周期内完成,因为乘法和除法是比较复杂的运算。乘法:乘法可以通过一系列的加法和移位来实现。处理器中的乘法单元通常包括:部分积生成器(Partial Product Generator):将两个乘数的每一位相乘,生成部分积。部分积累加器(Partial Product Accumulator): 将所有部分积相加,得到最终的乘积。这个过程可能需要多个时钟周期,因此在流水线中可能会有多个阶段用于处理不同的部分。除法:除法通常比乘法更为复杂,可能涉及到迭代的过程。处理器中的除法单元通常包括:部分商生成器(Partial Quotient Generator): 生成每一位的部分商。部分商累加器(Partial Quotient Accumulator): 将所有部分商相加,得到最终的商。这个过程同样可能需要多个时钟周期,并且可能需要进行多轮迭代来得到最终的结果。
在流水线中,这些乘法和除法的阶段可能被划分为多个子阶段,以便在每个时钟周期内执行一些部分操作。流水线的设计需要考虑到数据相关性、控制信号的传递以及流水线暂停和刷新等问题,以确保正确且高效地执行指令。
3.当且仅当Busy且指令为乘除有关的那八条指令时阻塞
1 | |
4.清晰性:每个字节的写分开,互不干扰,统一性:各个字节的控制信号仍然来自m_data_byteen[3:0]
5.不是,如果只实现按字使能,就不得不先读取值再进行更改,这样数据通路就延长了,导致效率下降。
6.对于选择信号以及条件尽可能实现宏定义来实现,避免出现6‘b100000这种无缘无故的常数,方便查找bug
7.连续的乘除有关的那八条指令,同3进行阻塞或者转发实现,测试数据
1 | |
8.多增加连续的乘除有关的那八条指令,其余同P5构造
{temp_hi, temp_lo} <= {hi, lo} + $signed($signed(64’d0) + $signed(rs) * $signed(rt));